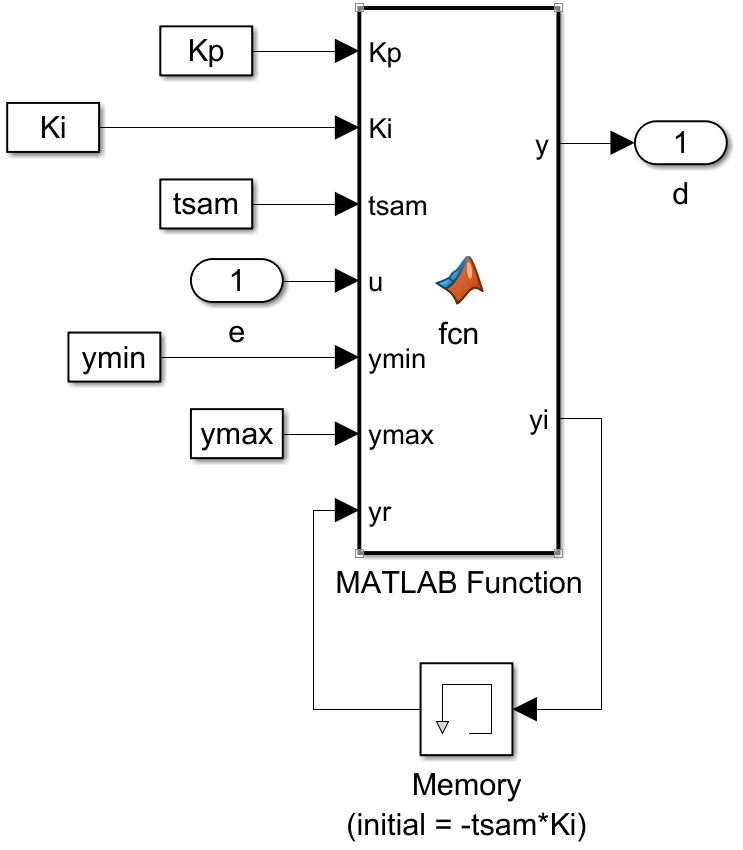
The PI controller with anti windup (clamping) is implemented using code.
When the PI controller is implemented into hardware, the conventional PI controller or the Integrator block in Simulink cannot be used. This code represent these block in the form of code so that it can be transfer to the hardware.