
Vehicles are reaching the highest levels of autonomy, but roadway infrastructure remains largely unintelligent, limiting the safety, efficiency, and robustness of the overall road transportation system. A significant portion of this limitation arises from the lack of real-time capability, autonomy, network-wide coverage, and crowdsourcing in the deployed sensing systems. Using conventional sensing, a comparable level of smartness for roads and traffic is achievable only by deploying a highly dense network of roadside fixed sensors, and/or a large number of dedicated scanning vehicles evenly distributed over the transportation network, which is impractical and not economically feasible. To deal with this gap, in this proposal, for the first time, the repurposing of on-the-road CAV data termed as In-Fleet platform is proposed for roadway monitoring and traffic management, and it is shown how the synergistic integration of CAVs’ perception, localisation, communication and distributed computing can provide a comparable level of sensing autonomy of CAVs (Levels 4-5) for the ITS. To this purpose, an In-Fleet integrated CAV/Infrastructure/roadway digital twin is constructed, fed by multi-source CAV perception data, vehicle telemetry and trajectory, V2X inputs and infrastructure design specifications. The proposed method enables network-wide crowdsourced, continuous, real-time, autonomous roadway monitoring and traffic management. This approach can drive a new research domain to become a paradigm shift in ITS. Roadway monitoring methods fall into three classes:
- Fixed infrastructure sensors,
- Mobile ground vehicles,
- Aerial systems.
Fixed intrusive (loops, magnetometers, pneumatic tubes) and non-intrusive (video/CCTV, radar, LiDAR, ultrasonic/acoustic, ALPR) sensors provide calibrated, location-specific data for control, incident detection, tolling, and safety (Yang & Pun-Cheng 2018; Plavac et al. 2024; Bottero et al. 2013). WIM systems estimate axle loads/classes at speed with differing performance/cost trade-offs (Adresi et al. 2024). Mobile platforms contribute corridor-scale measurements: drive-by bridge SHM (vehicle–bridge interaction), pavement-condition mapping (vision/LiDAR + GNSS/IMU), street-level inventory/HD-map extraction, on-road hazard detection, and probe data from fleets/phones for travel-time monitoring (Jenelius & Koutsopoulos 2013; Feng et al. 2014; Ramos et al. 2017; Kumar et al. 2014; Balali et al. 2015; Chu et al. 2022; Zheng et al. 2024; Malekjafarian et al. 2022). Aerial sensing (UAVs, aircraft, satellites) offers infrastructure-independent coverage: UAV optical/thermal video derives counts/densities/queues, including low-light via thermal deep learning; spaceborne SAR (ATI, DPCA) detects vehicles and estimates speeds for near-real-time surveillance (Baumgartner & Krieger 2012; Meyer et al. 2006; Siems-Anderson et al. 2019; Barmpounakis & Geroliminis 2020). With these three classes of available sensing, achieving higher levels of autonomy (Levels 4–5), similar to CAVs, would require a highly dense network of roadside fixed sensors and/or a large number of dedicated scanning aerial or ground vehicles evenly distributed across the transportation network, which is an impractical and economically infeasible approach. Figure 3 compares the conventional and in-Fleet monitoring platforms, their sensors, and advantages.
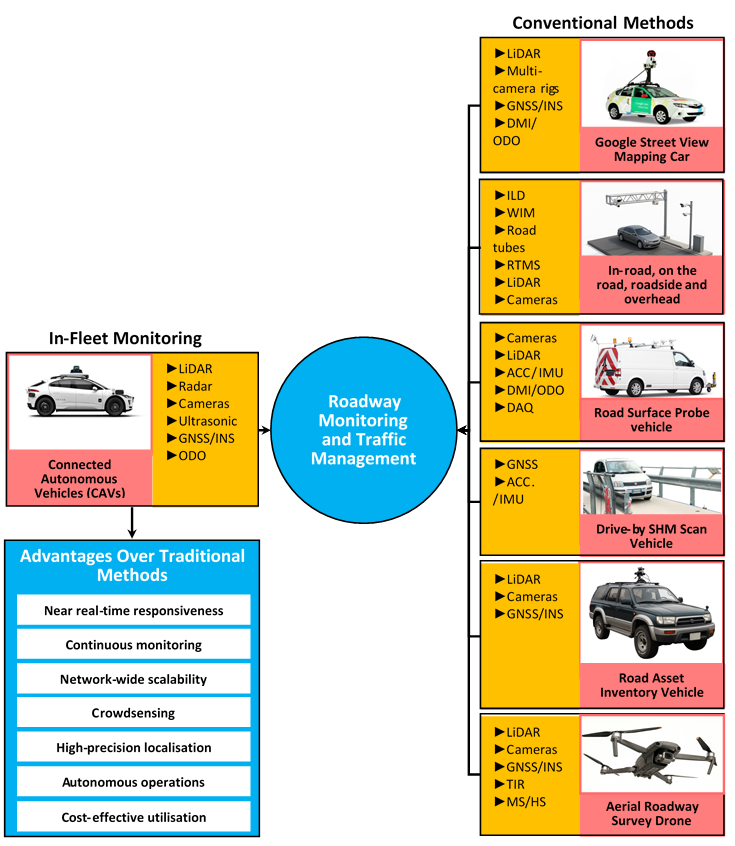
The In-Fleet Monitoring platform is proposed to offer a level of intelligence comparable to that of CAVs. To the authors’ knowledge, this is the first approach in the literature in which CAV data are used for (I) debris and pavement-distress detection (potholes, cracks, ravelling), (II) monitoring of road furniture (signs, road markings, traffic lights), (III) structural health monitoring of roadway bridges and (IV) integrated traffic management and control. In-Fleet Monitoring redefines infrastructure intelligence by leveraging the inherent sensing capabilities of CAVs. Unlike fragmented systems or low-accuracy mobile data, the proposed platform delivers multimodal, high-resolution insights, positioning CAVs as dual-purpose assets for both automated driving and roadway monitoring/traffic management. Beyond this, the method addresses the challenges of conventional ITS systems and enables:
- Near real-time responsiveness
- Continuous monitoring
- Network-wide scalability
- Distributed crowdsensing
- High-precision localisation
- Cost-effective utilisation
- Dynamic mobile sensing
- Autonomous data operations
These capabilities have been considered impossible with conventional road-monitoring and management systems. This approach can open new research domains and transform how cities achieve adaptive, scalable transportation resilience.
Implementation
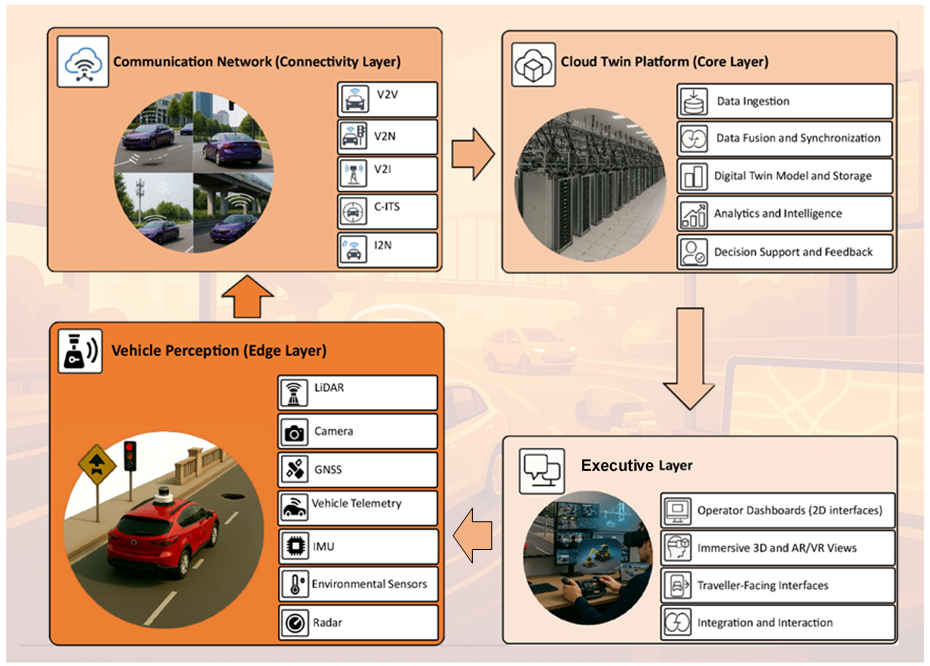
An overview of the implementation approach and work plan is below. The platform consists of four layers: vehicle perception, communication network, cloud twin, and decision/execution, as illustrated in Figure 4. CAVs continuously collect multimodal sensor data and transmit it via 5G/V2X to a cloud digital twin, where fleet data are fused, stored, and analysed to maintain a near-real-time model of the road network. Resulting actions are fed back to vehicles, roadside infrastructure, or traffic management centres.
This integrated platform supports the full range of roadway monitoring and traffic management applications. A comprehensive literature review and methodology (excluding verification) appear within six different topics:
- The In-Fleet Roadway View—using CAV data to replace dedicated street-level mapping fleets, lowering costs
- The digital-twin architecture linking requirements to the roadway-view mapping
- Integrated traffic management (simulation, visualisation, forecasting, incident management, analytics/reporting, traveller information, parking/curb, freight/logistics, environmental assessment, public transport, and active/micromobility)
- Drive-by bridge SHM without on-bridge sensors
- Road debris and distress detection
- Road-furniture monitoring
In general, the stages of implementation are as follows: Stage 1 vehicle perception, Stage 2 communication network, Stage 3 cloud twin/core with subsystems—debris & pavement, road furniture, bridge SHM, integrated traffic management, and Stage 4 decision/execution with pilot/shadow, progressive go-lives, and network-wide ops/sustainment.
Impact & Evaluation
At least six UN SDGs hinge on transport. In-Fleet utilizes CAV data to provide near-real-time monitoring and responsive management, enhancing routing, incident response, debris clearance, pavement upkeep, and asset/marking oversight—particularly valuable as low- and middle-income countries prepare for CAV deployment.
