
Background
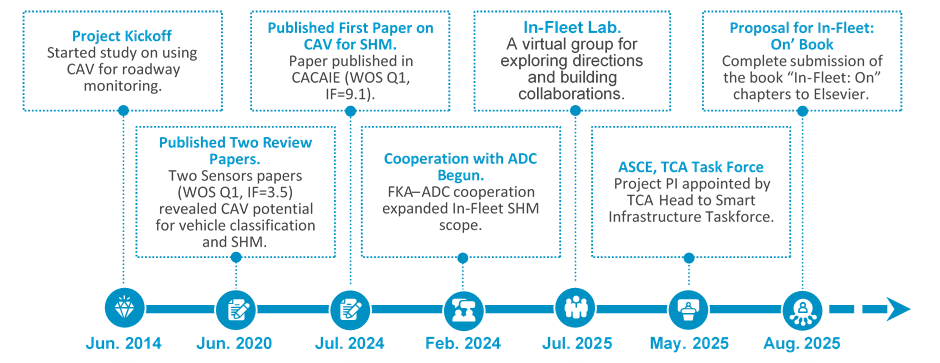
Led by Dr. Hoofar as the principal investigator, the project kicked off in 2014 to pursue sensor-free SHM for real-time, autonomous, network-wide coverage; early results appeared in 2020 (Shokravi et al., 2020a and Shokravi et al., 2020b). Subsequent work deepened CAV-based methods and introduced the “In-Fleet SHM”, as the world’s first CAV-assisted SHM, published in Computer-Aided Civil and Infrastructure Engineering (A Q1 journal with an impact factor of 9.1). In 2024, collaboration with UTM’s Automotive Development Centre (ADC) broadened the scope to roadway and traffic monitoring and management. The literature review exposed a key gap: no existing research perspective yet enables the L4–L5 sensing needed for intelligent transportation systems (ITS) to match the smartness level of CAVs. Therefore, a digital-twin–enabled In-Fleet program was initiated. Figure 1 charts the project timeline, highlighting milestones from 2014 to 2025.
Given its breadth (transportation/CAVs, infrastructure, digital twin, robotics/controls, distributed systems, and front-end engineering), we initiated outreach to vet the fundamentals and feasibility, ensuring that the proposed conceptual framework is soundly grounded in rigorous scientific principles. To this end, an expert network of leading scientists from the relevant disciplines was contacted and engaged to review, challenge, and refine the underlying assumptions and methodology.
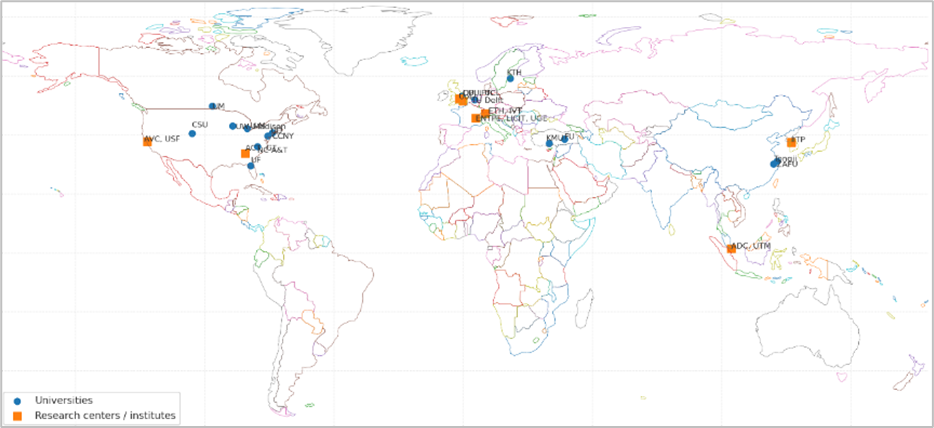
The network spans 29 institutions across Asia, Europe, and North America—five research centers/labs (ADC/UTM, ACT Lab/Georgia Tech, LICIT/U. Gustave Eiffel–ENTPE, IVT/ETH Zürich, IFTC/Coventry), 23 universities/colleges, and one government R&D institute (IITP, Korea)—mapped in Figure 2.
In July 2025, we formed the In-Fleet Lab as a virtual hub and convened collaborators. Meanwhile, the project’s PI also joined ASCE’s Smart Infrastructure Task Force to contribute to ongoing efforts around research agendas, standards, and best practices for data-driven, resilient, and automated infrastructure systems.
