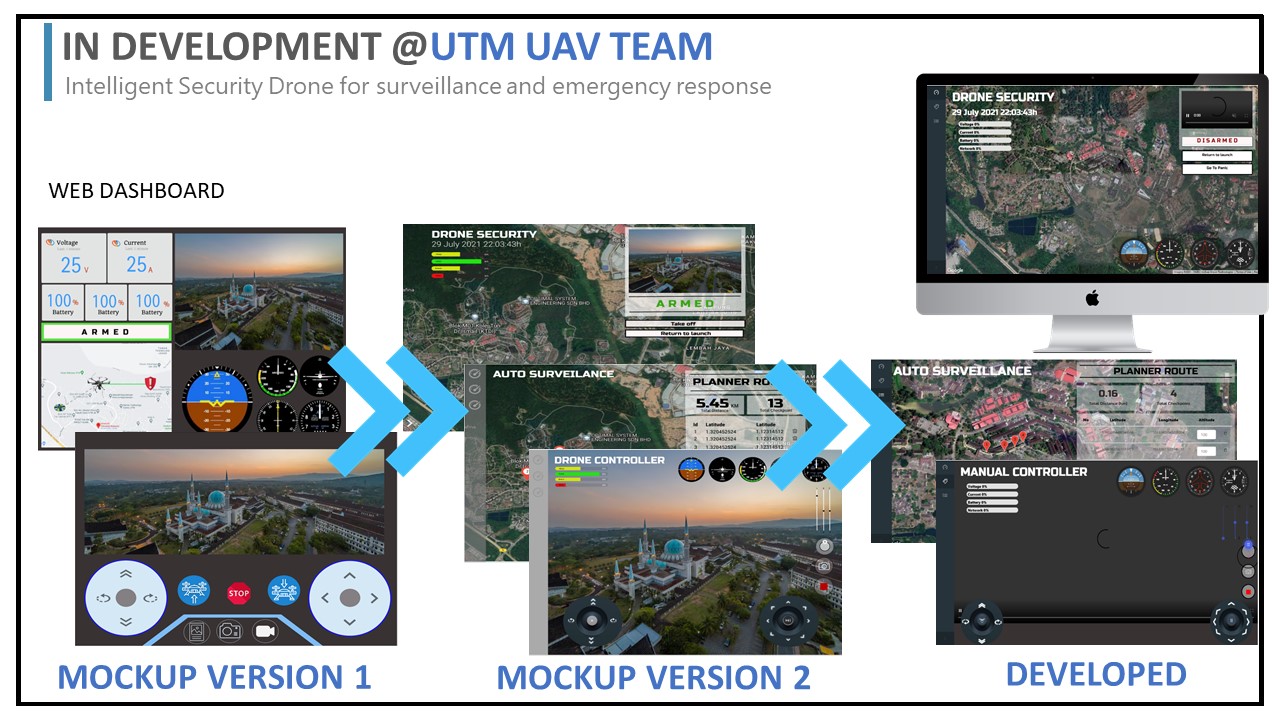
JagaDrone v1

JagaDrone v2

JagaDrone v3

JagaDrone Waterproof
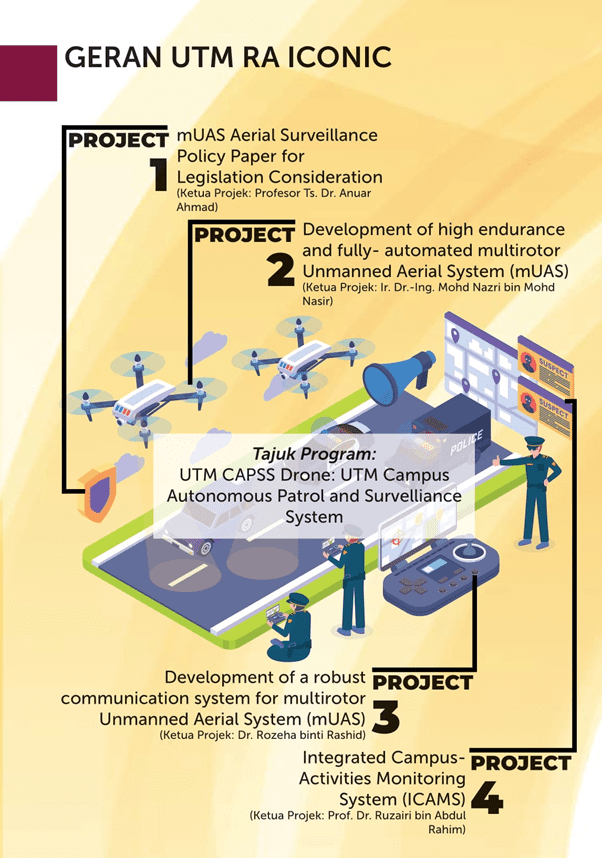


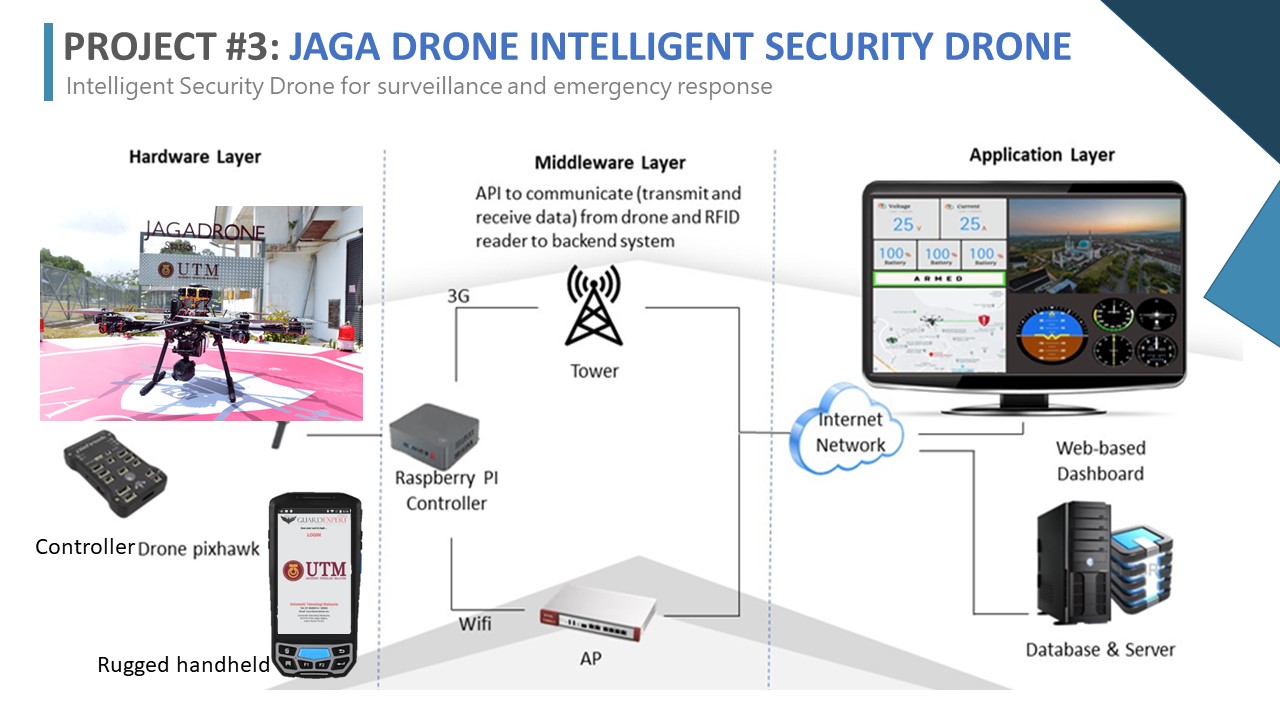



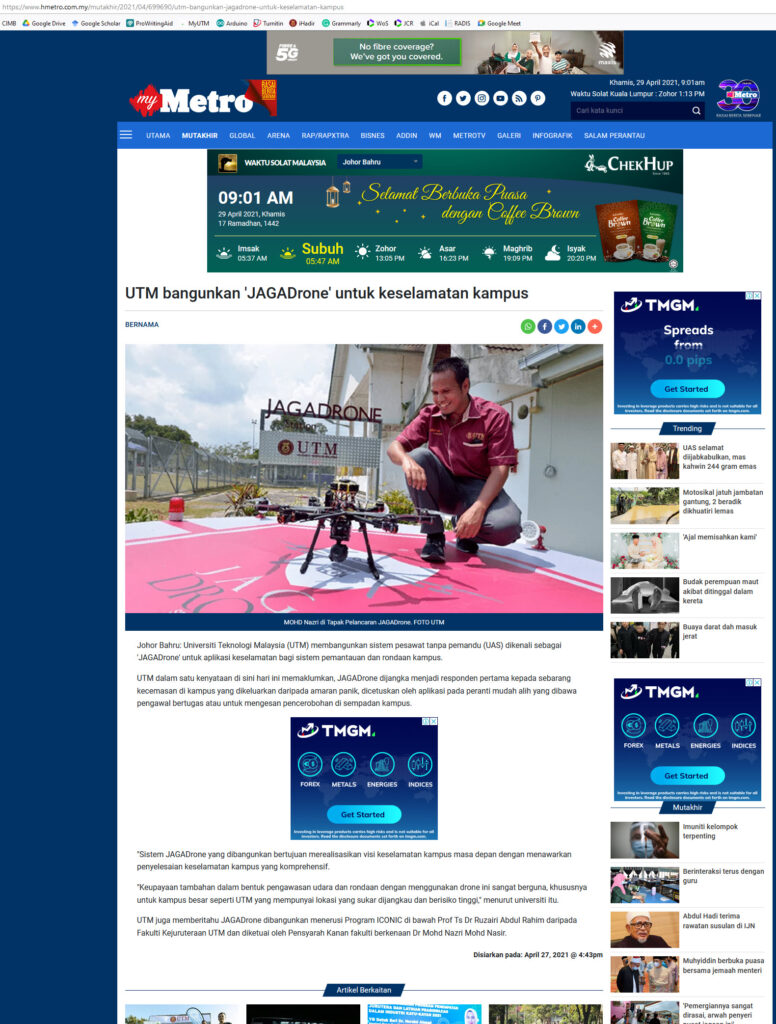
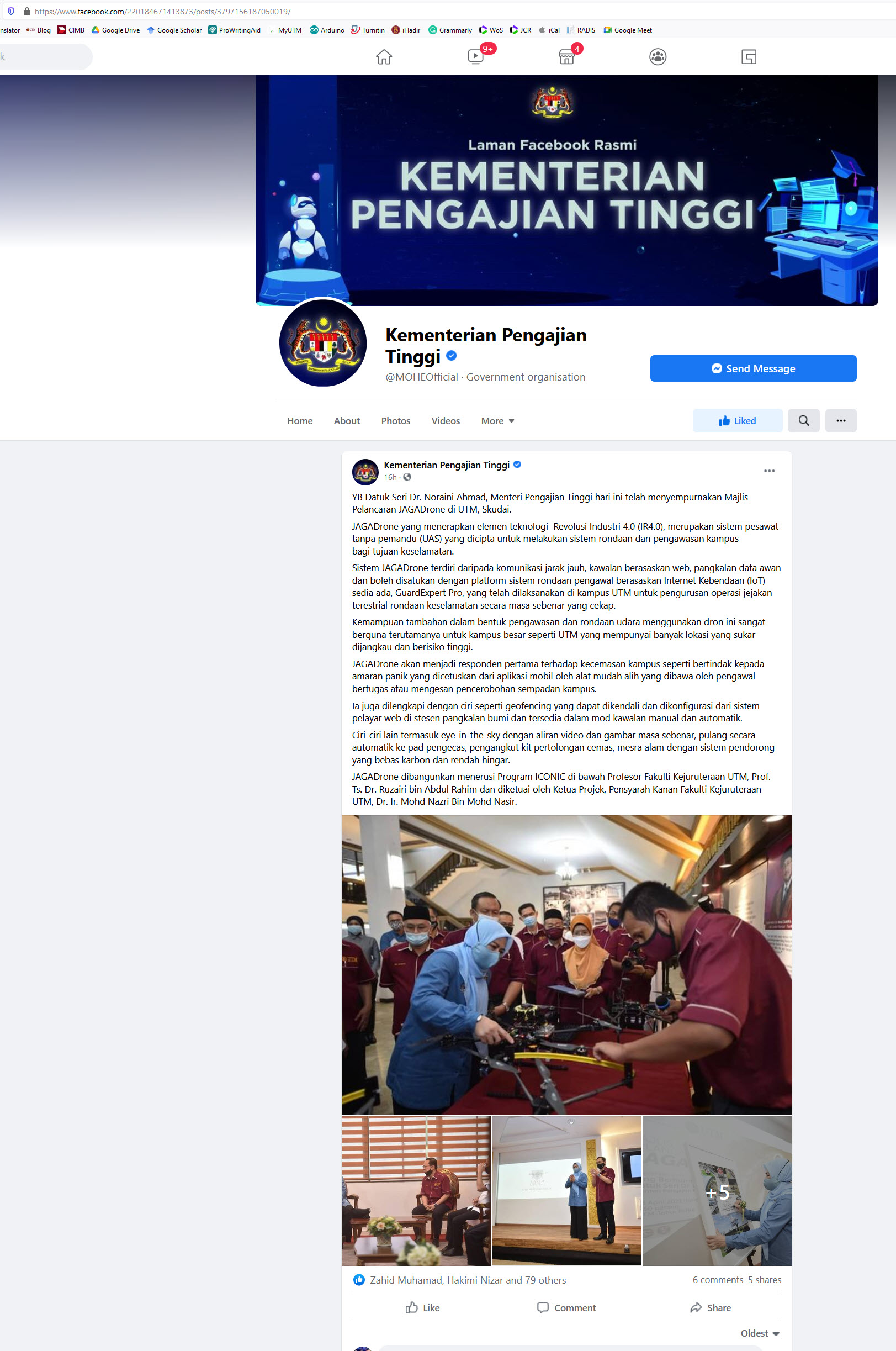
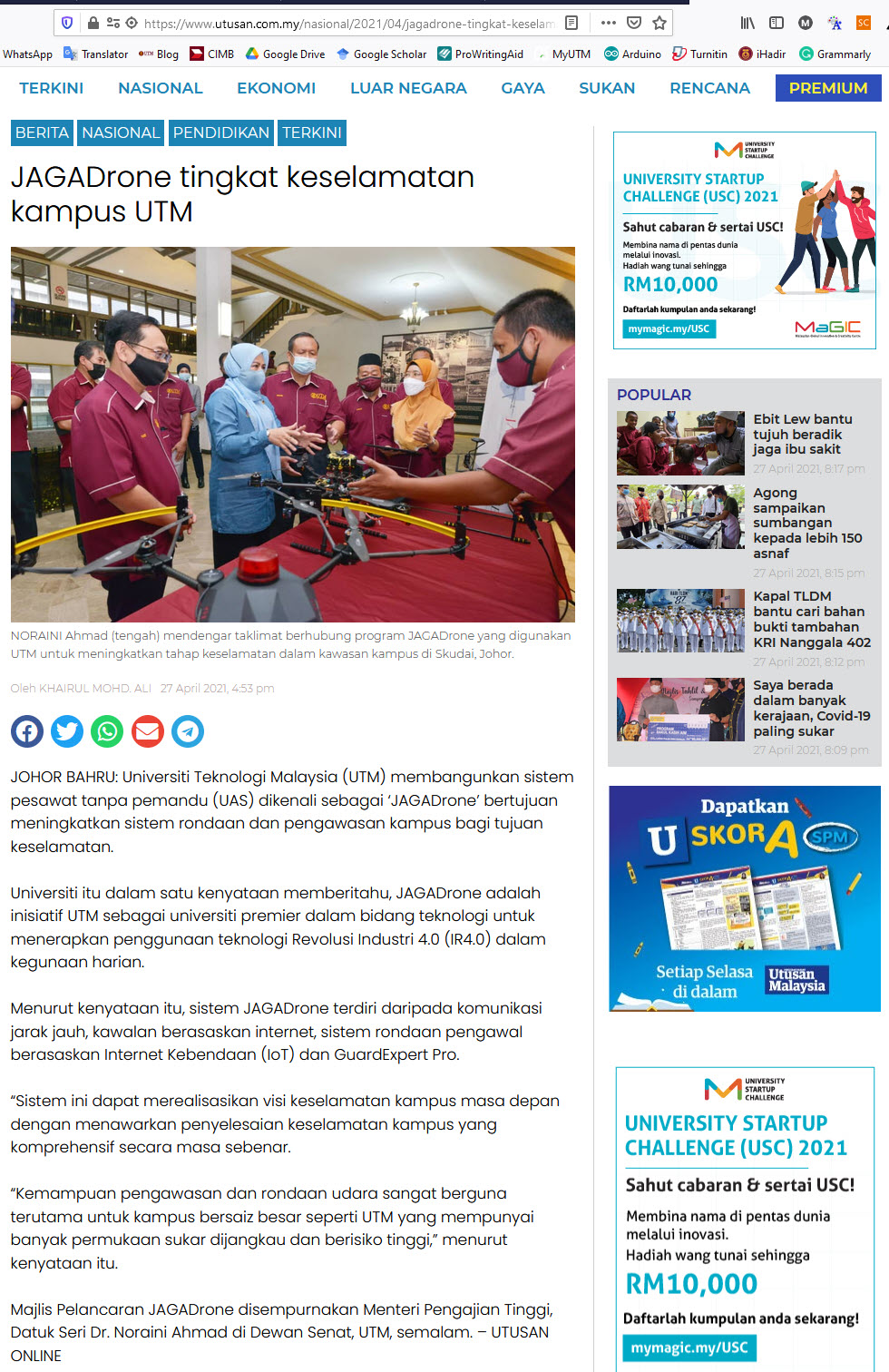
This project aims to realize the vision of future campus security with the utilization of drone technology. The Jagadrone consists of robust long-range communication, cloud computing technology, web-based software and supports integration with the existing UTM’s GTS system. The application of Jagadrone can offer a more comprehensive campus security solution by providing added capabilities in the form of aerial surveillance and patrolling for a large campus with hard-to-reach, high-risk locations as well as being the first responder to campus emergencies. This feature will be available in both manual and autonomous modes. Other features include eye-in-the-sky with real-time video streams and images, auto return to charging pad, first aid kit transporter, environmentally friendly with carbon-free emission, and low-noise propulsion system.
| Specification | Value | ||
| Name | JagaDrone v3 | ||
| Frame | Hexacopter 680 mm (diagonal size) Height 290mm | ||
| Frame arm rod diameter | 16 mm | ||
| Frame kit material | 3K carbon fiber | ||
| Weight | 4335g (include battery and propeller) | ||
| Propulsion system | 360kV brushless motor with 1344 carbon fiber propeller 40A continuous current/ 60A burst current | ||
| Controller | STM32H753VIT6 32 Bit ARM® Cortex®-M7, 400 MHz, 2 MB flash, 1 MB RAM; 400 MHz; 1MB RAM; 2MB Flash; STM32F100 (32Bit ARM® Cortex®-M3, 24 MHz, 8 KB SRAM | ||
| Gyroscope/ accelerometer | CM20948 / ICM20649 / ICM20602Gyroscope: ICM20948 / ICM20649 / ICM20602 | ||
| Stabilization | 3-axes (yaw, pitch and roll) | ||
| Satellite positioning system | GPS L1C/A, GLONASS L1OF, BeiDou B1I | ||
| Barometer | MS5611 | ||
| Battery | 6s Lithium polymer 12,000 mAh 15C 25A current consumption (during cruising) Net Weight: 1470g Dimensions: 184mm x 71mm x 61mm Nominal voltage: 22.2V (3.7V/cell) Operating voltage: 21V – 25.2V | ||
| Speed | 6ms-1 (average operating speed) 15 ms-1(maximum speed) | ||
| Maximum tilt angle | 42o | ||
| Ceiling service | 120m AGL | ||
| Maximum wind speed resistance | 10 m/s | ||
| Flight time | 30 minutes | ||
| Operating temperature | 0-40Co | ||
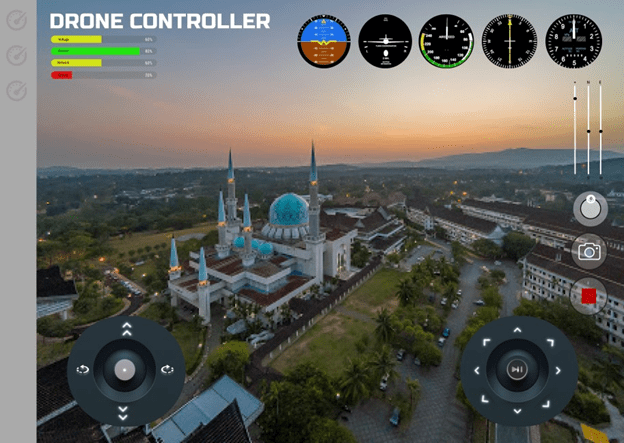
| Remote controller | Web-based computer dashboard and radio transmitter 2.4GHz | ||
| Communication system | 4g coverage (telemetry, image, flight command and control) | ||
| IP rating | 54 | ||
| Camera | IP camera, 4M, 1080p/ 60fps 10 mm- 300 mm focus distance 10x optical zoom 66.6-7.2o diagonal FOV Auto exposure compensation and white balance | ||
| Gimbal | -120 degree to +15 degree | ||
| Video | mp4/ MOV (AVC/H.264; HEVC/ H.265) 12V with 250mA, 365 grams | ||
| Onboard computer | Raspberry Pi 4 | ||
| Obstacle avoidance | 8 sensors in 360° around the hexacopter Range: *0.5m up to 60m Update rate: Up to 120Hz per sensor Output resolution: 0.5cm below 14m, 2cm from 14m Accuracy: ±4cm in the first 14m, 1.5% above 14m Size: 120 (D) mm x 42 (H) mm Eye safety: Yes (in accordance with IEC62471) Field of view: 2° per sensor, 45°between each sensor axis |
| Person in-charge | Scope |
| Prof. Dr. Sr. Anuar Ahmad | Drone Aerial Surveillance Policy Paper for Legislation Consideration |
| Ir. Dr.-Ing. Mohd Nazri bin Mohd Nasir | Development of high endurance and fully- automated multirotor Unmanned Aerial System |
| Dr. Rozeha binti Rashid | Development of a robust communication system for multirotor Unmanned Aerial System |
| Prof. Dr. Ruzairi bin Abdul Rahim | Integrated Campus-Activities Monitoring System (ICAMS) |