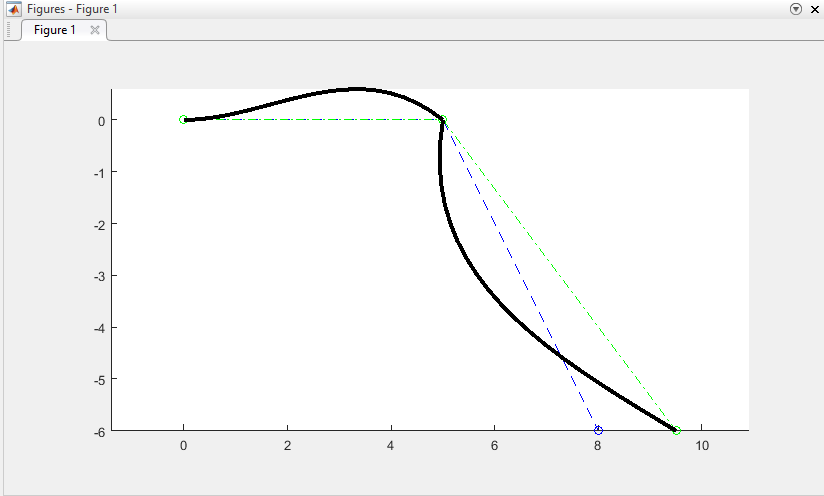
This is a MATLAB code to plot a deformation of planar frame structure.
Since the formulation involves transformation of local elements to a global system,
plotting using a simple w(x) versus x is not possible..
We need to transform back the DOFs obtained in the global system to the local system,
and plot in a local system and then simply ‘move & rotate’ it to suit the global position..
For example:

—————————————————————-
clear
clc
% INPUT
Points = [0 0; 5 0; 8 -6]; %Nodes
Cn = [1 2; 2 3]; %connectivity matrix
ne = length(Cn); %no.of elements
U = [0 0 0 0 0 -0.8 1.5 0 0.7]'; %deformation in global system
% PLOTTING
clf
hold on
% Simple plot for intial & deformed shapes
Uplot = U; Uplot(3:3:end) = [];
NewPoints = Points + reshape(Uplot,size(Points'))';
for i = 1:ne
plot(Points(Cn(i,:),1), ...
Points(Cn(i,:),2),'bo--') %initial
plot(NewPoints(Cn(i,:),1),...
NewPoints(Cn(i,:),2),'go-.') %deformed
end
for i = 1:ne
% Length of element
X = Points(Cn(i,2),1)-Points(Cn(i,1),1);
Y = Points(Cn(i,2),2)-Points(Cn(i,1),2);
L = sqrt(X^2+Y^2);
% Angle & transformation matrix
B = atand(Y/X);
c = cosd(B);
s = sind(B);
T = [c s 0 0 0 0; -s c 0 0 0 0;
0 0 1 0 0 0; 0 0 0 c s 0;
0 0 0 -s c 0; 0 0 0 0 0 1];
% Index number in the global system
index = [3*Cn(i,1)-2:3*Cn(i,1)...
3*Cn(i,2)-2:3*Cn(i,2)];
u = T*U(index); %local dofs
x = 0:L/20:L; %original local axis
% local horizontal displacements function, u(x)
N1bar = 1-x/L;
N2bar = x/L;
xx = x + N1bar*u(1) + N2bar*u(4);
% local vertical displacements function, w(x)
N1beam = -3*x.^2/L^2 + 1 + 2*x.^3/L^3;
N2beam = -2*x.^2/L + x + x.^3/L^2;
N3beam = 3*x.^2/L^2 - 2*x.^3/L^3;
N4beam = -x.^2/L + x.^3/L^2;
yy = N1beam*u(2) + N2beam*u(3) + N3beam*u(5) + N4beam*u(6);
% adjustment to the global axis (move the origin + rotate)
xr = Points(Cn(i,1),1) + xx*cosd(B) - yy*sind(B);
yr = Points(Cn(i,1),2) + xx*sind(B) + yy*cosd(B);
%plot(xx,yy,'c-') %plot at local axis (to check)
plot(xr,yr,'k-','LineWidth',3) %plot at global axis
end
hold off
axis equal
Recent Comments