Dr. Mohd Saiful Azimi Mahmud
Research Attachment Program (Kyoto University, 1 June 2018- 30 June 2018)
INTRODUCTION


In June 2018, I have conducted my research attachment at Laboratory of Field Robotics, Division of Environmental Technology and Science, Graduate School of Agriculture, Kyoto University. There, I have been supervised by Prof. Michihisa Iida, an expert in field robotics. During my stay at Kyoto University, many knowledges and experiences I have absorbed to improve my understanding regarding my research in field robotics.
TASK GIVEN

There, I have given a task to assemble a robot called Turtlebot 3 and I need to ensure that the robot is able to navigate autonomously using Robot Operating System (ROS). In addition, I have to also guide and teach a few undergraduate students on the procedure to operate the robot in various platforms and how we can further develop the robot for undergraduate research.
JOINED ACTIVITIES




One of the activities that I have joined during the research attachment is the automating rice transplanting operation experiment. In this activity, an autonomous rice transplanter has been operated to measure the efficiency in planting process. The data was collected by observing the planting pattern using drone. In this experiment, an RTK-GPS localization method is being used where a workstation need to be set up which consists of local GPS receiver and mobile computer to control the motion of rice transplanter.

To enhance the research quality by keeping track of research progress, the Field Robotics lab members are having a weekly meeting and lunch. In the meeting, the students are instructed to present their research progress to fellow students and lecturers. They are also having a discussion regarding the next plan in their research and how to improve the current progress.
RESEARCH DISCUSSION

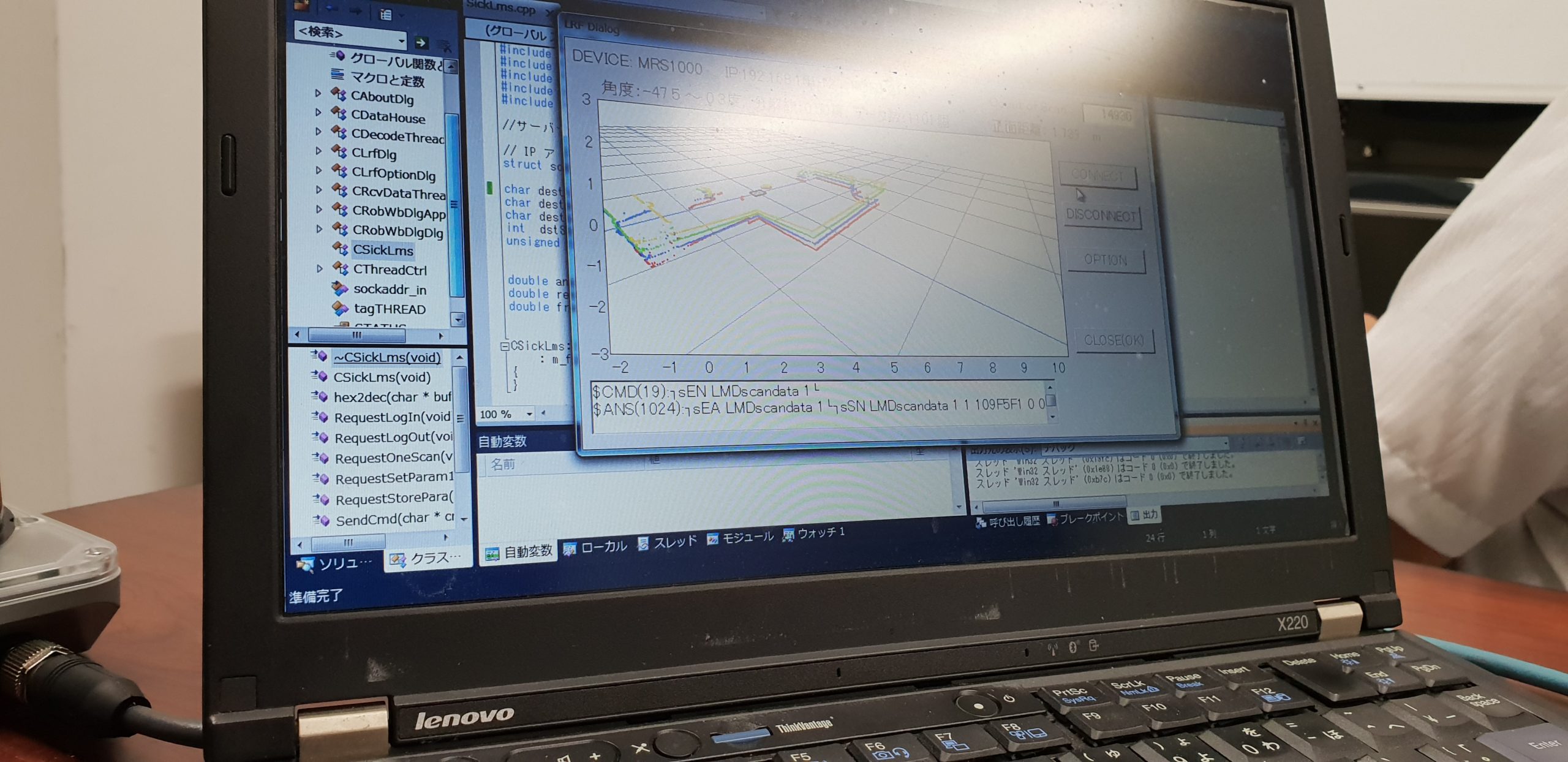
Before the research attachment ended, I have a chance to have a short discussion with Prof Iida regarding the future direction of my research. In that discussion, Prof Iida have suggested several future works which may be conducted to improve my future research by showing some interesting researches conducted by other labs. In addition to that, I am also able to test a 3D Lidar sensor called SICK MRS1000 and observed what data can be collected by the sensor.
GREETING PROFESSOR NAOSHI KONDO

During the last day at Kyoto University, I have an opportunity to have a short discussion with Professor Naoshi Kondo, a well known professor in agricultural automation and bio-sensing. There, I am introduced to several interesting researches in bio-sensing where several types of localization methods are explained by his fellow students.
VISIT TO TOKYO UNIVERSITY OF AGRICULTURE AND TECHNOLOGY