by azurati | Feb 8, 2017 | Engineering, Research
List of theses from Embedded Systems Laboratory (ESL), Leicester (2009-2015). Most of them are my best friends and colleagues.
1) Bridging the gap between scheduling algorithms and scheduler implementations in time-triggered embedded systems : https://lra.le.ac.uk/handle/2381/4561
2)Techniques for scheduling time-triggered resource-constrained embedded systems :https://lra.le.ac.uk/handle/2381/7761
3)Monitoring and designing predictable timetriggered software architecture for real-time embedded applications: https://lra.le.ac.uk/bitstream/2381/33514/1/2012chanklphd.pdf
4) Reducing jitter in embedded systems employing a time-triggered software architecture and dynamic voltage scaling : https://lra.le.ac.uk/bitstream/2381/30246/1/U227747.pdf
http://ieeexplore.ieee.org/document/1566573/
5) Task Oriented Fault-Tolerant Distributed Computing for Use on Board Spacecraft: https://lra.le.ac.uk/bitstream/2381/36268/1/2015fayyazmfphd.pdf
6) Design and evaluation of flexible time-triggered task schedulers for dynamic control applications : https://lra.le.ac.uk/handle/2381/36166
7) Design and evaluation of a predictable embedded processor for use in time-triggered applications : https://lra.le.ac.uk/handle/2381/32507
8) Techniques intended to reduce the impact of program-flow errors on embedded systems : https://lra.le.ac.uk/handle/2381/30200
9) Improving the performance and reliability of systems which employ the ’CONTROLLER AREA NETWORK’ protocol through low-level changes to the controller implementation : https://lra.le.ac.uk/handle/2381/9466
10) The Impact of Software Architecture on the Cost of Design, Implementation and Verification of Reliable Embedded Systems : https://lra.le.ac.uk/handle/2381/28166
11) The design of predictable multi-core processors which support time-triggered software architectures : https://lra.le.ac.uk/handle/2381/29237
12) Techniques for the implementation of control algorithms using low-cost embedded systems : https://lra.le.ac.uk/handle/2381/8220
by azurati | Oct 28, 2015 | Research, Uncategorized
Dear Researchers,
Congratulation to all successful researchers who have secured FRGS Grant Phase 1/2015. Please take necessary action as follows:
Task 1 – Due date: 3rd Nov 2015
Must revise your proposal in MyGrants system as per MOHE panel’s comment. The start date of the project is 2nd November, 2015. Please revise budget, milestone and Gantt chart accordingly.
Once you are have completed with the revision, select the Status to Complete and click Save to submit revised proposal to RMC for finalization.
Task 2 – Due date: 3rd Nov 2015
After revising the proposal in MyGrants System, Project Leader need to submit TWO (2) hardcopy FRGS Agreements to RMC.
Researchers only need to fill up information in page 3, 7 & 8 and print completed agreement in A4 size paper (both side).
Task 3 – Due date : 6th Nov 2015
After completing Task 1 and Task 2, researchers need to register FRGS Grant in RADIS System.
Required documents and guidelines can be downloaded from RMC portal (url:http://rmc.utm.my) on news & announcement “MYGRANTS, AGREEMENT & RADIS FOR FRGS PHASE 1/2015”
i. Research Agreement
ii. How to Register FRGS into RADIS System
iii. Result FRGS Phase 2-2014 (to be uploaded in RADIS as proof of approval)
by azurati | Oct 23, 2015 | Research
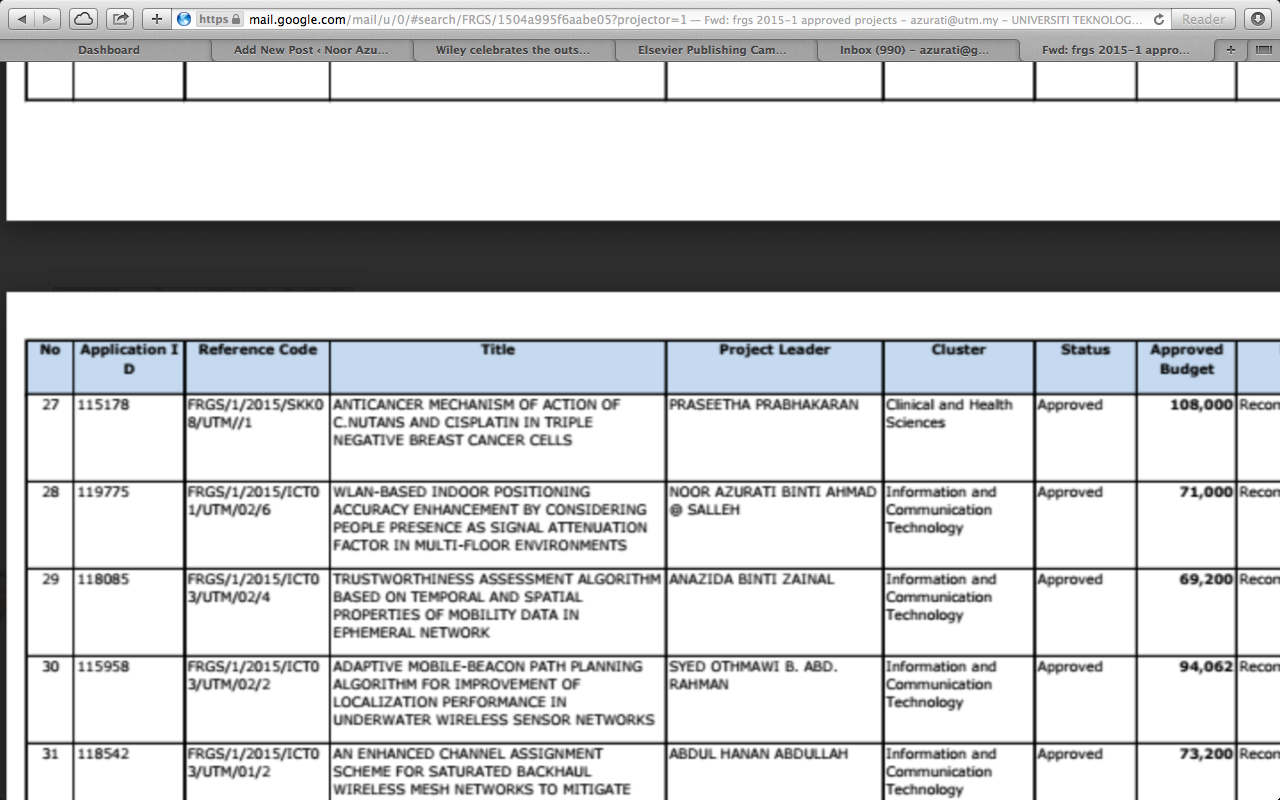
Alhamdulillah… I am one of them! First time being a PI for a BIG project (for a ‘tiny’ person like me). Maybe it is just a small achievement for some researchers.
However, for me, it is one of the most amazing GIFTS from HIM. May Allah give HIS barakah to me and my student, Eyad, to use the money wisely and provide good results and output. This is my stepping stone to grow my research studies… Low Carbon…Smart Cities.. IoT.. Wearable Tech. InshaaAllah.
All the best AZURA and team! Wish us luck readers!
Keep up the good work to all my beloved students.. You’re the best… stay humble…and work hard..
FRGS 2015 Grant

by azurati | Oct 15, 2015 | Research
Looking for a drone? I have found two nice drones – particularly for Search and Rescue and Harvest Monitoring Project.
Phantom 2

Phantom 3
PHANTOM 2 DUAL CAMERA SAR AND INSPECTION SYSTEM – 640 RES
http://www.uavdirect.com/ProductDetails.asp?ProductCode=Phantom2%2DSYST%2D640&CartID=1
System Includes
• Enhanced DJI Phantom 2
• FLIR TAU IR Thermal Camera
• Wide Range SONY EFFIO Camera
• Camera Tilt Control
• On Screen Flight Telemetry
• Long Range Video Downlink
• Diversity Receiver System
• Futaba Long Range RC
• Autonomous Flight System
• Five Lithium Flight Batteries
• Additional Flight Accessories
by azurati | Jun 27, 2013 | Research
On July 4, 1997, Pathfinder landed successfully in the Ares Vallis region of Mars. The spacecraft was a robotic embedded system, designed to collect samples, capture video images and transmit meteorological readings back to Earth. Unfortunately, in its third week of operation, the Pathfinder encountered problems that required a total system reset (Cook and Spear, 1998), resulting in long data acquisition delays (Durkin, 1998).
It took three weeks (Durkin, 1998) for the engineers at the Jet Propulsion Laboratory (JPL), to remotely diagnose the problem. The software bug was eventually fixed following extensive simulations lasting eighteen hours (Durkin, 1998). Once the software in the spacecraft was updated, it again became fully operational.
In many ways, the successful debugging of the Pathfinder can be seen as a significant achievement. Despite the device being millions of miles away on another planet, programmers were able to restore it to normal operation. However, if we factor in that it took, what is probably one of the most advanced engineering teams on the planet, around three weeks to address the problem the success is not quite so impressive. For instance; had this been a manned mission, and the failure involved a critical function, the astronauts may not have survived for three weeks.
The importance of rapid testing and verification has already been acknowledged in aerospace, automobile and military domains. For example, NASA and ESA (Sha et al., 2004) have sponsored extensive studies into the impact of costs incurred during development phases and assessment prior to design. In addition, the need to use appropriate software architecture to ensure the testability of complex real-time systems has been noted by scholars (e.g. Kopetz (1991), Scheler, (2006), Thane (2000) and Xu, (2003)). However, there is not yet broad acceptance over the best way to design such systems in order to reduce testing costs.