By Shahabuddin Amerudin
Global Navigation Satellite System (GNSS) receivers are vital in Geographic Information Systems (GIS), serving as the foundation for accurate spatial data collection. These systems are integral to a wide range of applications, including urban planning, precision agriculture, infrastructure development, and environmental monitoring, all of which demand high positional accuracy for reliable decision-making. Achieving sub-meter accuracy is essential, as even small positional errors can have significant implications, such as misalignment in land parcel delineation or imprecise application of resources in precision agriculture (Lachapelle & El-Rabbany, 2021). GNSS receivers, however, vary in performance due to factors like environmental conditions, satellite geometry, and receiver quality. This article explores the most recent methods employed to evaluate GNSS accuracy, with a focus on achieving sub-meter precision and reliability.
1. Root Mean Square Error (RMSE) Analysis
Root Mean Square Error (RMSE) is one of the most widely utilized metrics for assessing GNSS receiver accuracy. RMSE calculates the difference between GNSS-measured coordinates and reference coordinates, providing an overall measure of positional error. It has become a standard method for evaluating accuracy across diverse GNSS applications, including those requiring sub-meter precision.
The primary advantage of RMSE is that it offers a single-value summary of the average error, allowing for straightforward comparisons between different receivers or correction methods. For example, in precision agriculture or urban planning, using RMSE enables decision-makers to quantify how much the GNSS-based positional data deviates from known control points (Rizos & Wang, 2022). RMSE is calculated by comparing the deviations in the X, Y, and Z axes and is particularly useful when determining how well a receiver performs under various environmental conditions.
2. Circular Error Probable (CEP)
Circular Error Probable (CEP) is another widely used method for evaluating the accuracy of GNSS receivers, particularly in measuring horizontal accuracy. CEP defines a circle within which 50% of the GPS measurements are expected to fall, offering a simplified yet effective way to assess positional accuracy in two-dimensional space. It is especially useful in GIS applications that rely heavily on horizontal coordinates, such as mapping and navigation (Langley, 2023).
CEP is often applied in tandem with RMSE to provide a more nuanced understanding of GNSS accuracy. While RMSE evaluates overall error, CEP focuses specifically on horizontal accuracy, making it ideal for GIS users interested in the precision of latitude and longitude measurements (Misra & Enge, 2019). By analyzing the distribution of positional errors, CEP gives an intuitive measure of how spread out or clustered the data points are around the true position.
3. Horizontal and Vertical Dilution of Precision (HDOP/VDOP)
Dilution of Precision (DOP) is a critical factor in determining GNSS accuracy, with Horizontal DOP (HDOP) and Vertical DOP (VDOP) values indicating the quality of satellite geometry and its impact on positional accuracy. Low DOP values suggest better satellite configurations, which improve the reliability of positional data.
HDOP and VDOP are particularly useful for assessing how satellite geometry affects horizontal and vertical accuracy, respectively. Many GNSS receivers report HDOP and VDOP values alongside positional data, allowing users to evaluate the quality of the satellite constellation at the time of data collection (Groves, 2020). This makes DOP values essential for understanding how well GNSS receivers perform in varying environmental conditions, such as urban canyons or heavily forested areas, where satellite visibility may be obstructed (Lachapelle & El-Rabbany, 2021).
4. Standard Deviation of Coordinates
The standard deviation of coordinates provides insight into the consistency of GNSS receiver performance by measuring the variation of positional data around a mean value. It is particularly useful in detecting irregularities or errors caused by multipath effects or signal interference. This method allows researchers to evaluate the spread of GNSS measurements and identify outliers that may be affecting overall accuracy.
The standard deviation is calculated by averaging the collected coordinates and determining how much each data point deviates from this average. A low standard deviation indicates that the positional measurements are closely clustered around the mean, reflecting good consistency and reliability (Kaplan & Hegarty, 2017). This method is especially beneficial for applications where long-term consistency is more critical than instantaneous accuracy, such as in environmental monitoring or geodetic surveying (Misra & Enge, 2019).
5. Kinematic vs. Static Testing
In addition to static testing, where the GNSS receiver remains stationary at a known point, kinematic testing evaluates receiver performance during movement. Kinematic testing simulates real-world applications, such as vehicle tracking or navigation, where the receiver must maintain accuracy while in motion.
Kinematic testing provides valuable insights into how well a GNSS receiver performs under dynamic conditions, making it essential for assessing performance in navigation-based applications. In these tests, the receiver is moved along a predetermined path, and its recorded positions are compared to the known path using metrics like RMSE and CEP. This method is crucial for understanding how well a receiver can maintain accuracy while compensating for motion, an essential consideration in vehicle-based GIS applications (Li & Zhang, 2022).
6. Multi-Constellation GNSS Evaluation
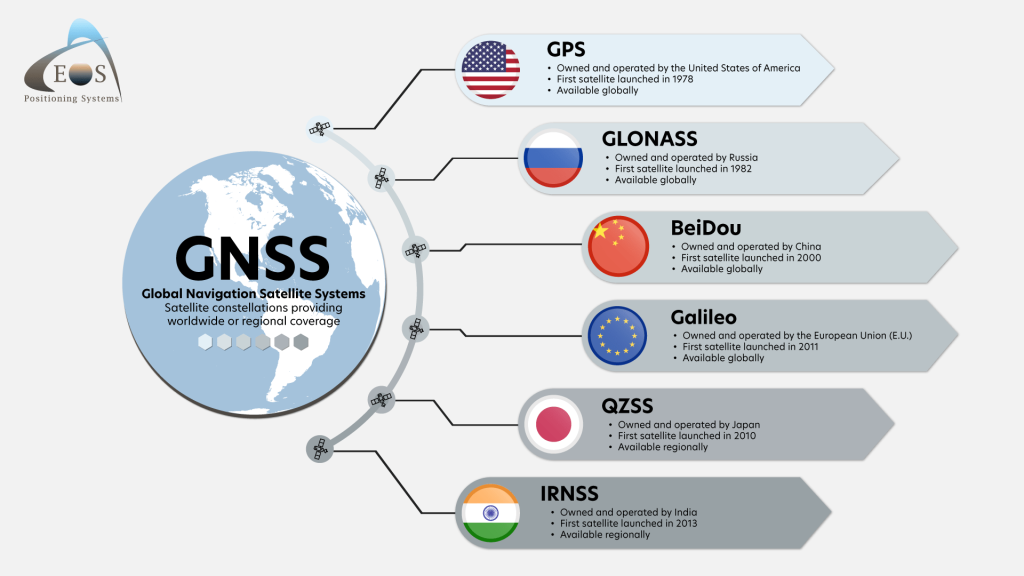
Modern GNSS receivers have the ability to track multiple satellite constellations, such as GPS, GLONASS, Galileo, and BeiDou, which improves the accuracy and reliability of positional data. Evaluating performance across multiple constellations allows researchers to identify which satellite systems and combinations provide the best accuracy in various environments.
Multi-constellation tracking has become particularly important in environments where satellite visibility is limited, such as urban areas with tall buildings or dense forests. By using multiple constellations, GNSS receivers can compensate for the limitations of individual systems, leading to improved accuracy and reliability (Wubbena & Seeber, 2021). Performance is evaluated by comparing data collected from different constellations and analyzing the impact on positional accuracy using metrics such as RMSE and standard deviation (Hofmann-Wellenhof & Lichtenegger, 2020).
7. Positional Accuracy Improvement with Differential Correction
Differential correction techniques such as Real-Time Kinematic (RTK), Satellite-Based Augmentation Systems (SBAS), and Precise Point Positioning (PPP) are commonly used to improve GNSS accuracy. These methods provide correction data that compensates for satellite and atmospheric errors, significantly enhancing the precision of positional measurements.
RTK, for example, can achieve sub-centimeter accuracy, making it an invaluable tool for applications requiring high precision, such as cadastral mapping or infrastructure development. The effectiveness of differential correction is often assessed by comparing data collected with and without correction, with accuracy improvements quantified through RMSE and other metrics (Ge & Xie, 2023). These correction methods are crucial for ensuring reliable GNSS data in areas where uncorrected GNSS signals may be insufficient for sub-meter accuracy.
8. Geostatistical Analysis
Geostatistical methods, such as Kriging and Spatial Autocorrelation, are increasingly used to analyze the spatial distribution of GNSS errors. These techniques help identify areas where errors cluster and understand how environmental factors, such as building density or tree cover, influence GNSS accuracy.
By adding a spatial dimension to error analysis, geostatistical methods offer valuable insights into the environmental variables that affect GNSS performance. Kriging, for instance, can model the spatial distribution of errors, allowing researchers to predict where inaccuracies are likely to occur based on environmental conditions (Ge & Xie, 2023). This approach is particularly useful for urban planners and environmental scientists who need to account for spatial biases in their data.
9. Machine Learning-Based Accuracy Prediction
In recent years, machine learning techniques have emerged as a powerful tool for predicting GNSS accuracy based on environmental factors. Models such as decision trees, random forests, and neural networks use historical GNSS data and environmental conditions to predict likely accuracy levels before data collection occurs.
Machine learning models can analyze vast amounts of data to identify patterns and predict GNSS performance in challenging environments, such as areas with poor satellite visibility or extreme weather conditions (Kim & Park, 2022). This predictive capability enables GIS professionals to anticipate accuracy issues and adjust their data collection strategies accordingly, making machine learning an invaluable tool for improving GNSS reliability.
Conclusion
The evaluation of GNSS receiver accuracy is critical to ensuring the reliability of spatial data in GIS applications. Recent advancements in evaluation methods, such as RMSE, CEP, DOP analysis, and machine learning-based prediction, provide powerful tools for assessing and improving GNSS accuracy. These methods allow GIS professionals to make informed decisions about the reliability of their GNSS receivers, ensuring that spatial data collection workflows are optimized for accuracy and precision. The growing use of multi-constellation GNSS receivers and differential correction techniques further enhances the accuracy of positional data, making these methods indispensable for modern GIS applications.
References
Ge, M., & Xie, X. (2023). Geostatistical Approaches in GNSS Accuracy Analysis. GIScience Journal.
Groves, P. (2020). Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems.
Hofmann-Wellenhof, B., & Lichtenegger, H. (2020). GNSS: Global Navigation Satellite Systems – Applications and Challenges.
Kaplan, E. D., & Hegarty, C. (2017). Understanding GPS/GNSS: Principles and Applications.
Kim, Y. K., & Park, S. H. (2022). Machine Learning for GNSS Accuracy Prediction in Challenging Environments. Sensors.
Lachapelle, G., & El-Rabbany, A. (2021). Understanding GNSS Errors and Performance Metrics. GNSS Solutions.
Langley, R. B. (2023). Circular Error Probable in GNSS Accuracy Assessment. Navigation Journal.
Li, Y., & Zhang, L. (2022). Kinematic Testing for GNSS Receivers: A Review. International Journal of Navigation and Observation.
Misra, P., & Enge, P. (2019). Global Positioning System: Signals, Measurements, and Performance.
Rizos, C., & Wang, J. (2022). Evaluating GNSS Receiver Accuracy Using RMSE. Journal of Geodesy.
Wubbena, G., & Seeber, G. (2021). Multi-Constellation GNSS in Complex Environments. Journal of GNSS Engineering.
